

















BaseX
SKU:K037


描述
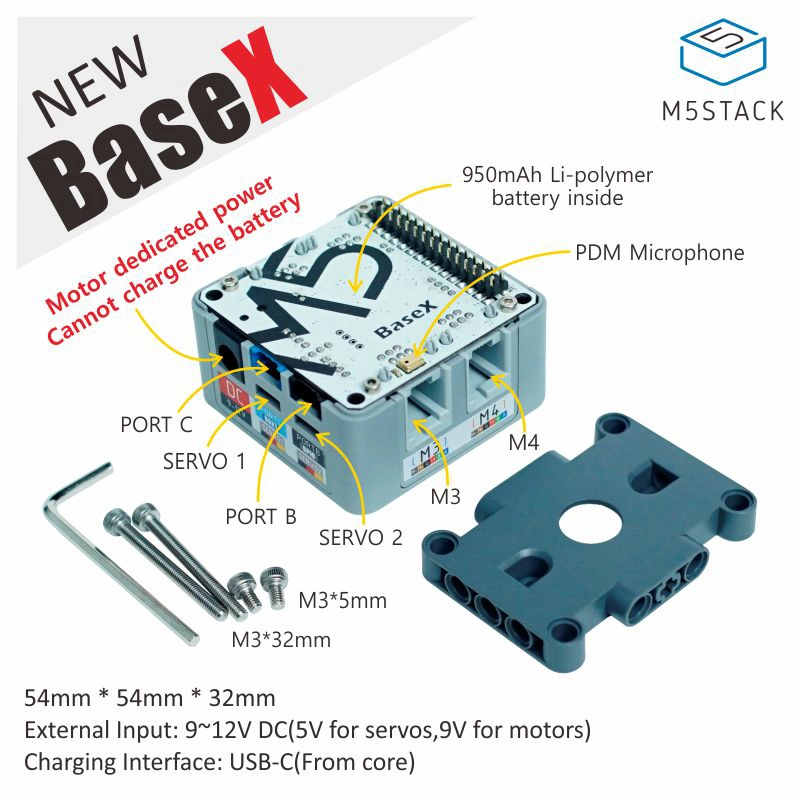
BaseX 是一款兼容乐高EV3电机的专用底座,结构设计上与BASE26类似,支持多种方式进行固定,并且额外提供一个乐高连接底座,在搭建乐高结构时可以将BaseX轻松嵌入到作品中。BaseX可同时接入4路(RJ11)乐高电机,支持角度/速度的读取和控制,完美兼容原有电机功能。此外,底座提供2个舵机接口,可以直接控制舵机旋转角度,一个内置的PDM麦克风可以采集声音。为了适应不同的使用场景,提供一个UART接口(16/17)与一个GPIO接口(26/36),接入各类传感器更加灵活。底座内置一块950mAh电池,可通过M5Core的USB-C接口进行充电,延长续航时间。为了提高接口的驱动能力,在底座上配备了DC电源插孔,可以通过外部9-12V直流电源为电机供电(不能通过底座进行充电)。
产品特性
- 4路RJ12乐高电机接口(底座合计最大电流输出能力2A)
- 2路舵机驱动(底座合计最大电流输出能力2A)
- 1路UART
- 1路GPIO
- 内置PDM麦克风(GPIO 34)
- 板载DC-DC转换(9 ~ 12V输入,仅为电机独立供电)
- 内置950mAh电池
- 多种固定方式/支持乐高孔连接
应用
- 乐高编码电机/舵机控制器
- 乐高玩具DIY智能控制
包含
- 1x BaseX
- 1x 乐高底座
- 2x M3 * 5mm 304不锈钢内六角螺栓
- 2x M3 * 32mm 304不锈钢内六角螺栓
- 1x M3内六角扳手
规格参数
| 规格 | 参数 |
|---|---|
| 净重 | 59g |
| 毛重 | 110g |
| 产品尺寸 | 54*54*26mm |
| 包装尺寸 | 150*65*40mm |



EasyLoader
EasyLoader介绍
1.EasyLoader是一个简洁快速的程序烧录器,每一个产品页面里的EasyLoader都提供了一个与产品相关的案例程序,通过简单步骤将其烧录至主控,能够进行一系列的功能验证.
2.下载软件后,双击运行应用程序,将M5设备通过数据线连接至电脑,选择端口参数,点击 "Burn" 即可开始烧录.(为M5StickC烧录时,请将波特率设置在750000或115200)
I2C控制说明
- I2C 从机地址: 0x22
| 功能 | 寄存器地址 | 值 |
|---|---|---|
| SERVO1_ANGLE_ADDR | 0X00 | 0~180 |
| SERVO2_ANGLE_ADDR | 0x01 | 0~180 |
| SERVO1_PULSE_ADDR | 0x10 | (uint16_t)500~2500 |
| SERVO2_PULSE_ADDR | 0x12 | (uint16_t)500~2500 |
| MOTOR1_PWM_DUTY_ADDR | 0x20 | -127~127 |
| MOTOR2_PWM_DUTY_ADDR | 0x21 | -127~127 |
| MOTOR3_PWM_DUTY_ADDR | 0x22 | -127~127 |
| MOTOR4_PWM_DUTY_ADDR | 0x23 | -127~127 |
| MOTOR1_ENCODER_ADDR | 0x30 | int32_t |
| MOTOR2_ENCODER_ADDR | 0x34 | int32_t |
| MOTOR3_ENCODER_ADDR | 0x38 | int32_t |
| MOTOR4_ENCODER_ADDR | 0x3C | int32_t |
| MOTOR1_SPEED_ADDR | 0x40 | -127~127 |
| MOTOR2_SPEED_ADDR | 0x41 | -127~127 |
| MOTOR3_SPEED_ADDR | 0x42 | -127~127 |
| MOTOR4_SPEED_ADDR | 0x43 | -127~127 |
I2C 电机地址:
| 电机编号 | 电机地址 |
|---|---|
| MOTOR1 | 0x50 |
| MOTOR2 | 0x60 |
| MOTOR3 | 0x70 |
| MOTOR4 | 0x80 |
配置方法 电机地址 + nBit
| 位 | 值 |
|---|---|
| 0 | 电机运行模式 |
| 1 | position-p(3) |
| 2 | position-i(1) |
| 3 | position-d(15) |
| 4|5|6|7 | position-point(低位有效) |
| 8 | position-max-speed |
| 9 | speed-p |
| 10 | speed-i |
| 11 | speed-d |
| 12 | speed-point |
| 电机运行模式 | 值 |
|---|---|
| Normal | 0X00 |
| Position | 0x01 |
| Encoder | 0x02 |
| 3 | position |
案例程序
Arduino IDE
点击此处 ,获取完整程序.
UIFlow

如何在UIFlow1.0图形化编程平台中使用Module basex以及相关API说明